|
I am a first-year Ph.D. student in Computer Science at Georgia Institute of Technology, advised by Prof. Glen Chou. Previously, I obtained my Master's degree from University of Illinois Urbana-Champaign, co-advised by Prof. Huan Zhang and Prof. Yunzhu Li. I obtained my dual Bachelor's degree from Zhejiang University and University of Illinois Urbana-Champaign, where I was fortunate to collaborate with Prof. Sayan Mitra. My research focuses on advancing intelligent and trustworthy robotic systems by bridging robot learning and formal verification. Driven by this vision, I explore topics such as motion planning in robotic manipulation, neural network verification, and reachability analysis of hybrid systems. kshen84@gatech.edu / Github / Google Scholar |
|
|
|
|
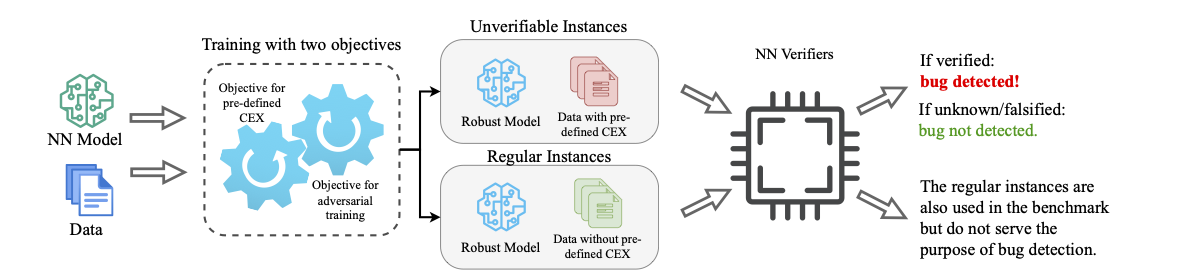
Xingjian Zhou*, Keyi Shen*, Andy Xu*, Hongji Xu*, Cho-Jui Hsieh, Huan Zhang, Zhouxing Shi Under review, 2025 arXiv / code / Hugging Face We propose a novel benchmark tailored for testing the soundness of NN verifiers. It successfully identified that 2 of the top 3 ranked NN verifiers in VNN-COMP 2025 can be unsound in certain cases. |
|
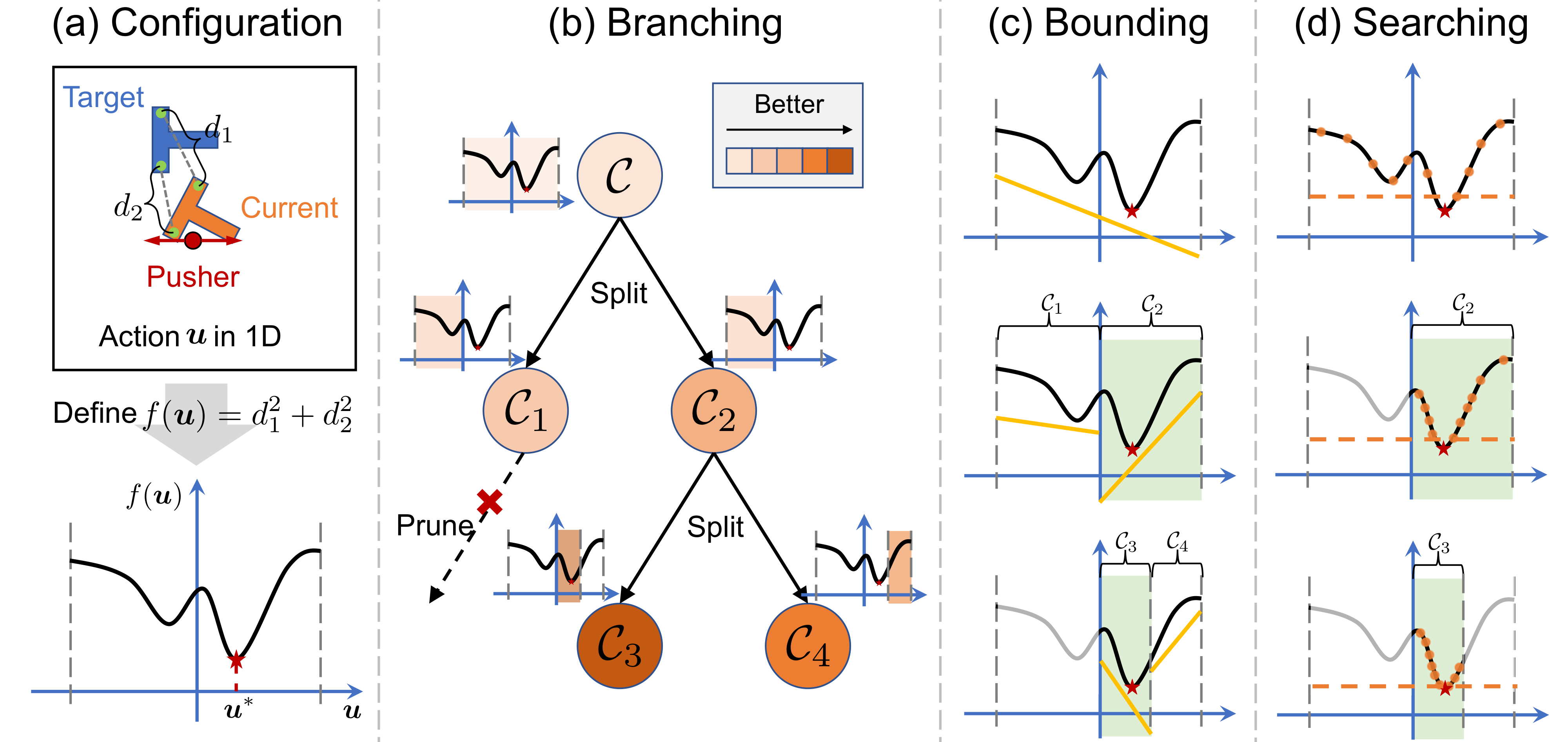
Keyi Shen*, Jiangwei Yu*, Huan Zhang, Yunzhu Li International Conference on Learning Representations (ICLR), 2025 Conference on Robot Learning (CoRL) DiffOpt and LEAP Workshops, 2024. Robotics: Science and Systems (RSS) FOR Workshop, 2024. website / arXiv / paper / code / poster We propose a GPU-accelerated branch-and-bound (BaB) framework for long-horizon planning with neural dynamics (ND) models. |
|
Haoqing Zhu, Yangge Li, Keyi Shen, Sayan Mitra International Symposium on Automated Technologies for Verification and Analysis (ATVA), 2023. paper / local version / code We present parallel and incremental verification algorithms for hybrid systems, which concurrently construct reachability trees and effectively reuse previous computations. |
|
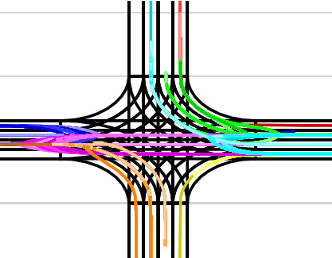
Yangge Li, Haoqing Zhu, Katherine Braught, Keyi Shen, Sayan Mitra International Conference on Computer Aided Verification (CAV), 2023. arXiv / paper / code We propose an open-source tool for modeling, simulation, and verification of multi-agent hybrid systems in Python. It has been used by over 70 students in ECE 484 at UIUC. |
|
Website template comes from Jon Barron
Last update: October, 2025 |